$ \ boldsymbol {\ S \:} \ textbf {A. In generale} $
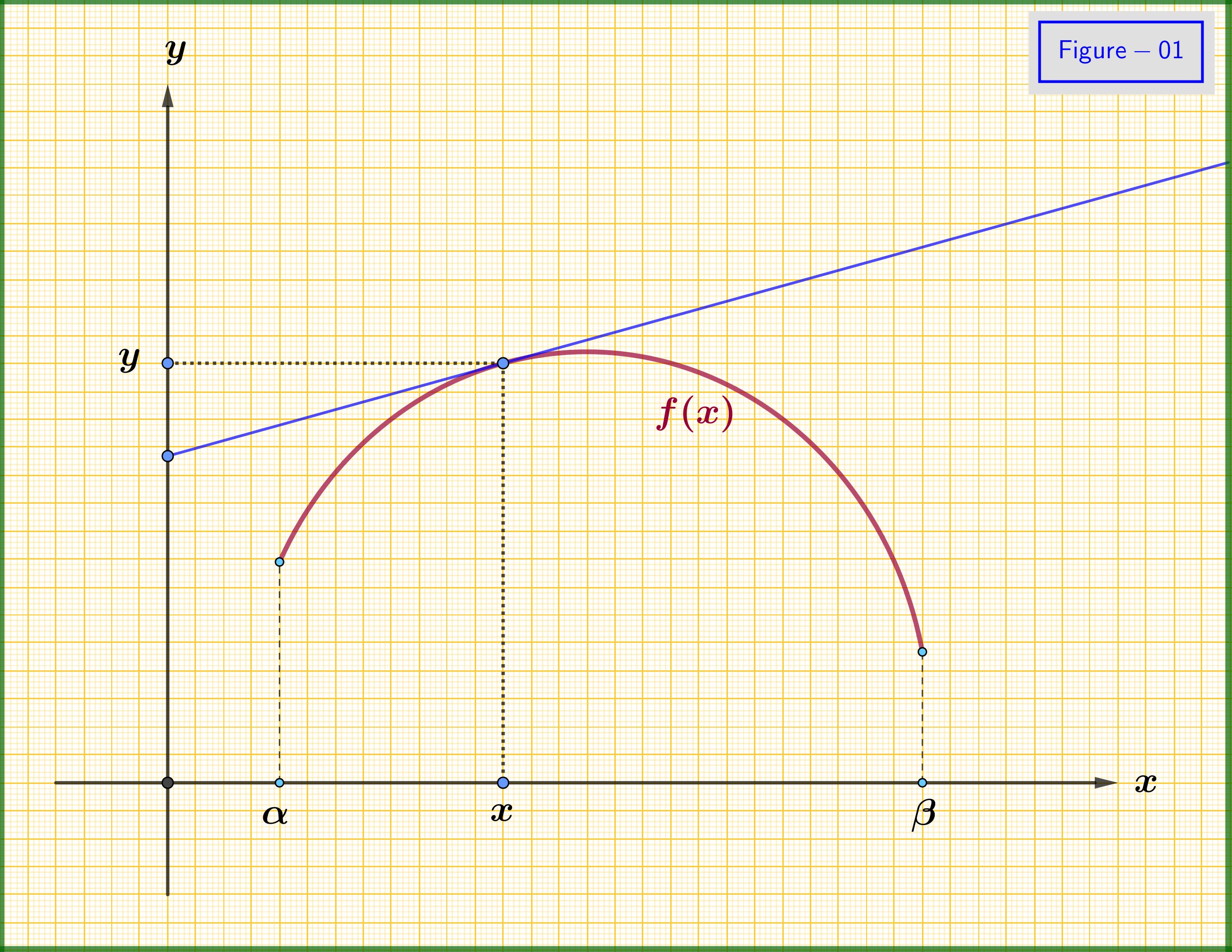
Considera una funzione reale $ \: f \ left (x \ right) \: $ di una variabile reale $ x \ in \ left [\ alpha, \ beta \ right] $ con derivate continue 1a e 2a. Supponiamo che la sua seconda derivata sia ovunque negativa in modo che il suo grafico nel piano $ \: xy- $ sia come nella Figura 01. Da ogni punto del grafico abbiamo una linea tangente.
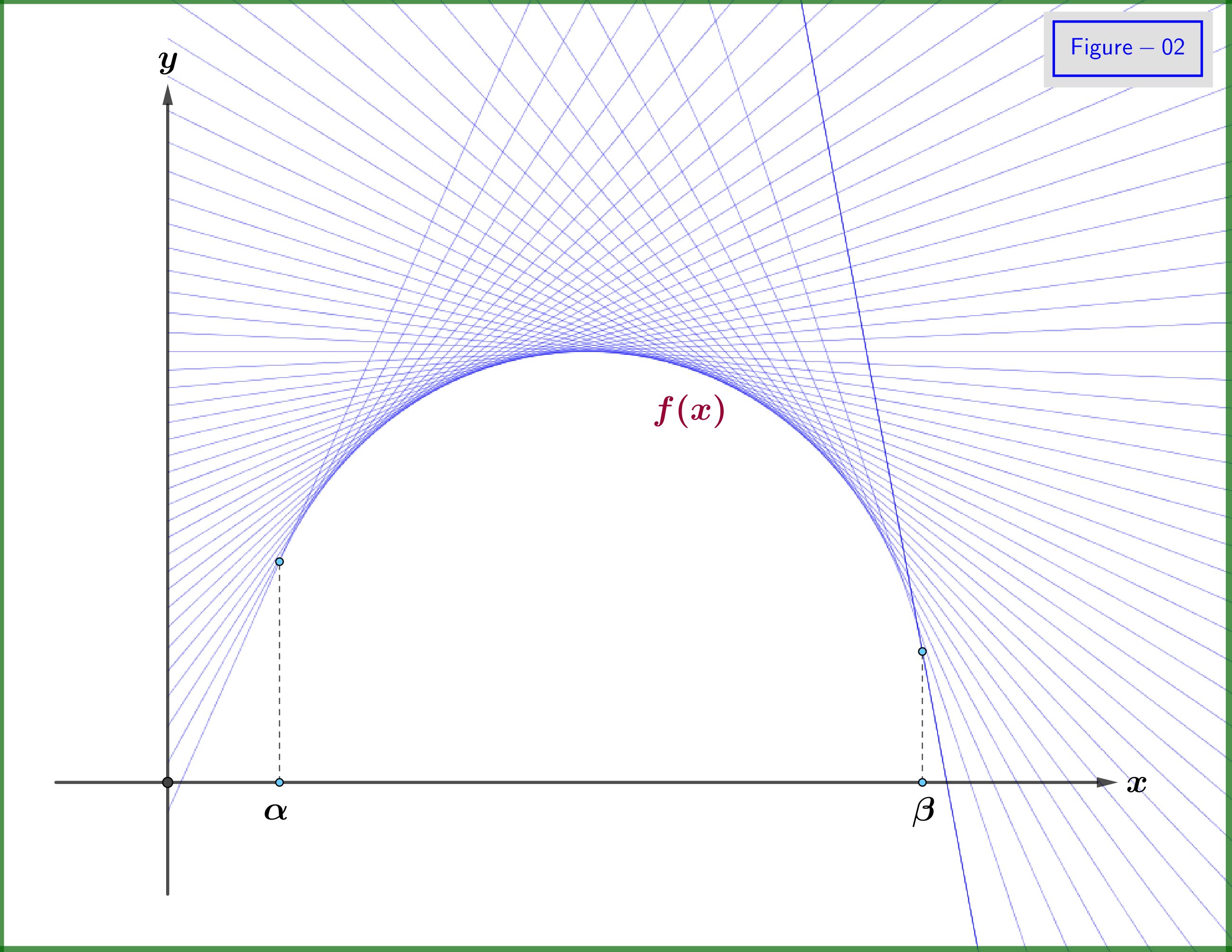
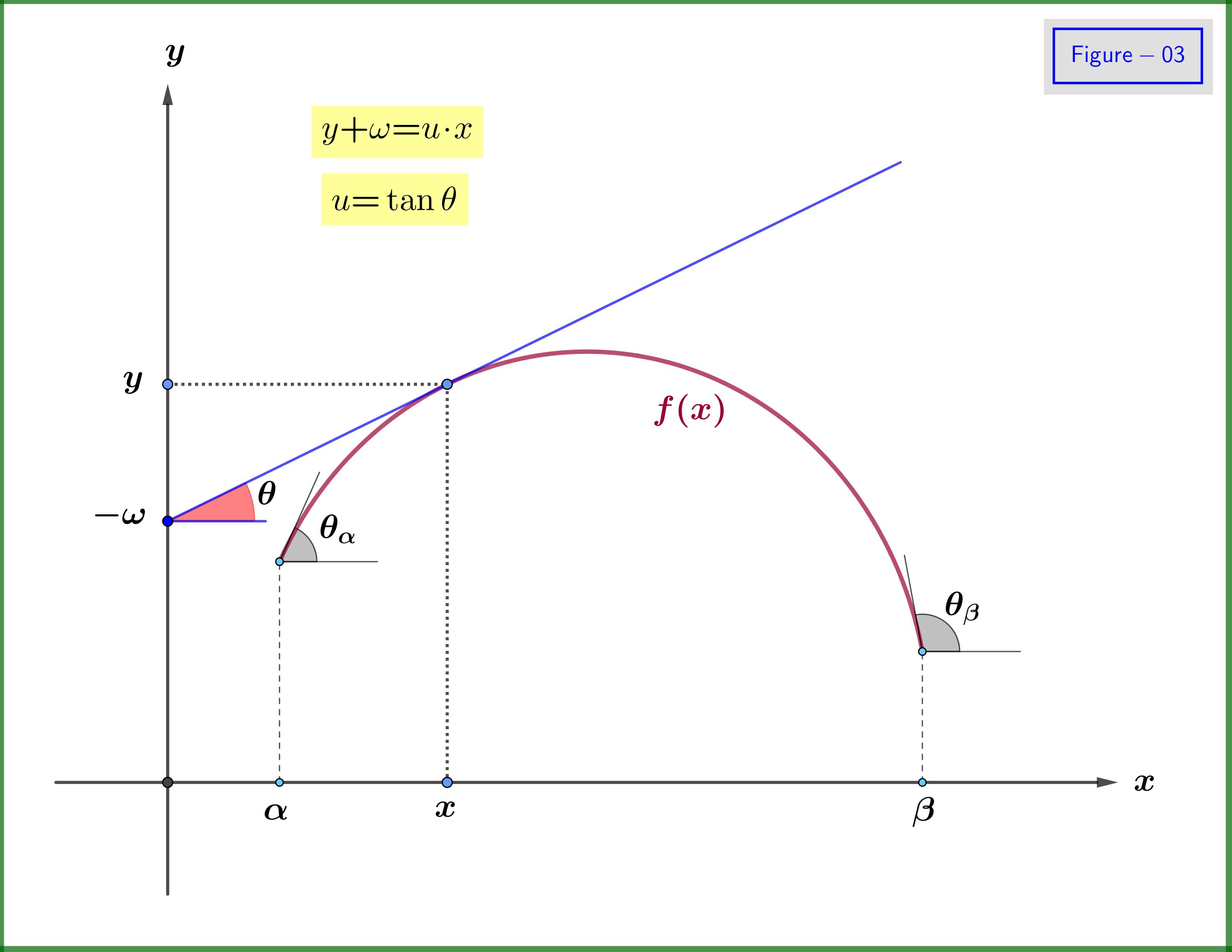
Ora, il grafico della funzione potrebbe essere tracciato dalla famiglia delle linee tangenti, vedere la Figura 02. Diciamo che questa curva (grafico) è l ' inviluppo della famiglia delle linee tangenti. Da questo fatto notiamo che potremmo definire la funzione $ \: f \ left (x \ right) \: $ dalla famiglia delle sue linee tangenti. Infatti, come mostrato nella Figura 03, se dall'angolo $ \: \ theta \: $ di una qualsiasi linea tangente, conosciamo il punto in cui questa linea interseca la $ \: y- $ asse, lascia che $ \: \ boldsymbol {-} \ omega \: $ (il segno meno utilizzato per scopi futuri), avremmo una definizione equivalente della funzione $ \: f \ left (x \ right) $ . Quindi, dobbiamo avere la funzione $ \: \ omega \ left (\ theta \ right) $ . Per il dominio dell'angolo $ \: \ theta \: $ abbiamo come esempio dalla Figura 03
\ begin {equation}
\ theta \ in \ left [\ theta_1, \ theta_2 \ right] \ quad \ text {dove} \ quad \ theta_1 \ boldsymbol {=} \ min {(\ theta_ \ alpha, \ theta_ \ beta)} \ quad \ text {e} \ quad \ theta_2 \ boldsymbol {=} \ max {(\ theta_ \ alpha, \ theta_ \ beta)}
\ tag {A-01} \ label {A-01}
\ end {equation}
Invece di utilizzare l'angolo $ \: \ theta \: $ utilizziamo ugualmente bene la variabile $ \: u \ boldsymbol {=} \ tan \ theta \ boldsymbol {=} \ dfrac {\ mathrm df} {\ mathrm dx} $ . Per il dominio di $ \: u \: $ abbiamo
\ begin {equation}
u \ in \ left [u_1, u_2 \ right] \ quad \ text {dove} \ quad u_1 \ boldsymbol {=} \ min {(\ tan \ theta_ \ alpha, \ tan \ theta_ \ beta)} \ quad \ text {e} \ quad u_2 \ boldsymbol {=} \ max {(\ tan \ theta_ \ alpha, \ tan \ theta_ \ beta)}
\ tag {A-02} \ label {A-02}
\ end {equation}
Dalla Figura 03 abbiamo
\ begin {equation}
y \ boldsymbol {+} \ omega \ boldsymbol {=} \ tan \ theta \ cdot x \ boldsymbol {=} u \ cdot x
\ tag {A-03} \ label {A-03}
\ end {equation}
così
\ begin {equation}
\ boxed {\: \: \ omega \ left (u \ right) \ boldsymbol {=} u \ cdot x \ boldsymbol {-} f \ left (x \ right) \ vphantom {\ dfrac {a} {b}} \: \:}
\ tag {A-04} \ label {A-04}
\ end {equation}
Ora guardando nell'equazione sopra sembra matematicamente illogico l'argomento che la funzione $ \: \ omega \: $ non dipenda dalla variabile $ \: x \: $ e dobbiamo scrivere
\ begin {equation}
\ omega \ left (u, x \ right) \ stackrel {???} {\ boldsymbol {=}} u \ cdot x \ boldsymbol {-} f \ left (x \ right)
\ tag {A-05} \ label {A-05}
\ end {equation}
Ma qui non è questo il caso perché da \ eqref {A-04}
\ begin {equation}
\ dfrac {\ partial \ omega} {\ partial x} \ boldsymbol {=} u \ boldsymbol {-} \ dfrac {\ partial f} {\ partial x} \ boldsymbol {=} \ dfrac {\ mathrm df} {\ mathrm dx} \ boldsymbol {-} \ dfrac {\ mathrm df} {\ mathrm dx} \ boldsymbol {=} 0
\ tag {A-06} \ label {A-06}
\ end {equation}
cioè $ \: \ omega \: $ è indipendente da $ \: x $ . Dipende solo da $ \: u \: $ ecco perché scriviamo $ \: \ omega \ left (u \ right ) $ .
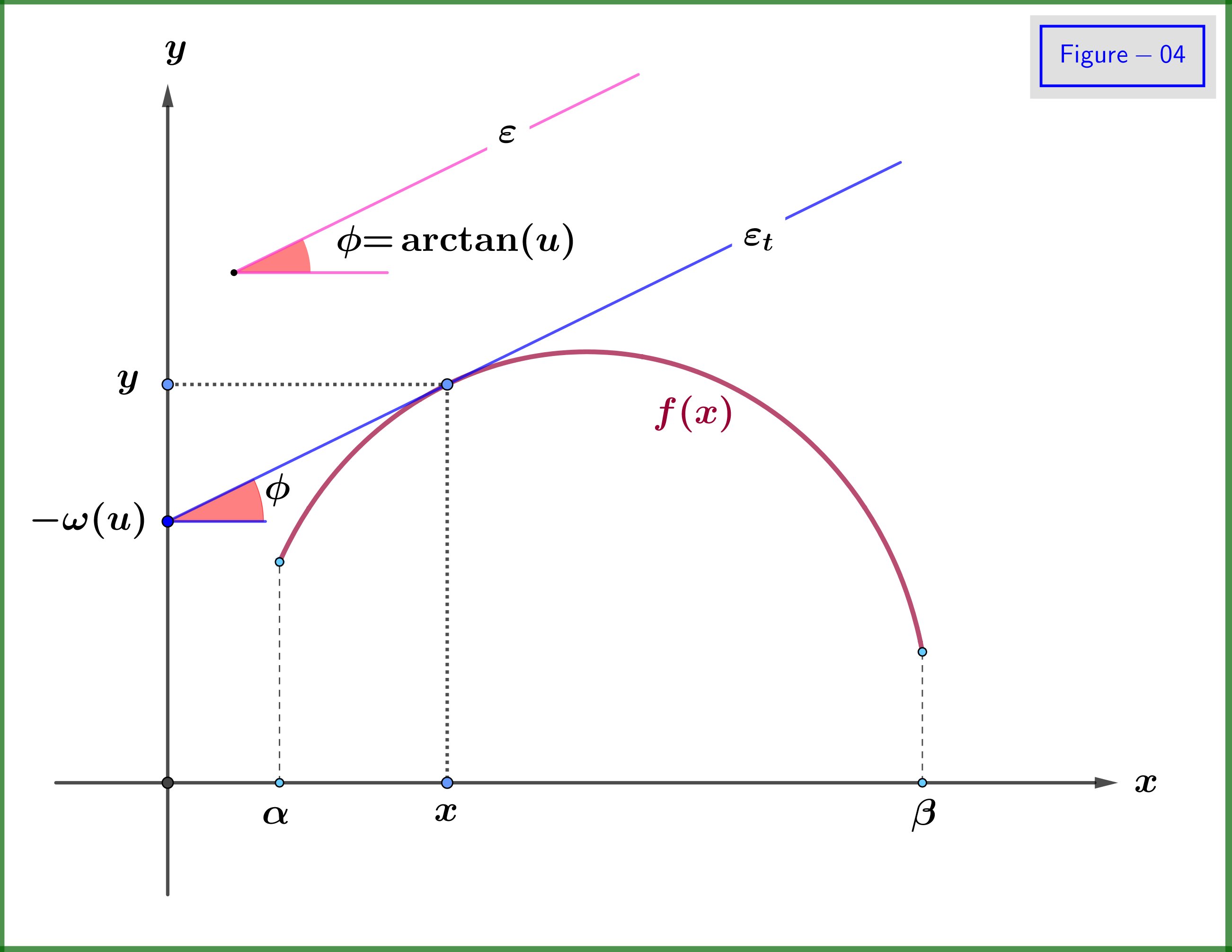
Nella Figura 04 questo fatto è spiegato graficamente: supponiamo che un valore $ \: u \ in \ left [u_1, u_2 \ right] \: $ sia dato. È come dare una direzione, ovvero una linea $ \: \ varepsilon \: $ con un angolo $ \: \ phi \ boldsymbol {=} \ arctan (u) $ . Troviamo una linea univoca $ \: \ varepsilon_t \: $ tangente al grafico della curva di $ \: f \ left (x \ right) \: $ e parallelo a $ \: \ varepsilon \: $ che interseca il $ \: y- $ asse in $ \: \ boldsymbol {-} \ omega (u) $ . Oltre il valore della variabile indipendente $ \: u \: $ non è necessario alcun valore di $ \: x $ . Al contrario, questo valore di $ \: x \: $ è determinato automaticamente sottoterra dal punto di contatto della linea tangente $ \: \ varepsilon_t \: $ con il grafico.
Chiamiamo la funzione $ \: \ omega \ left (u \ right) \: $ Legendre transform della funzione $ \: f \ left (x \ right) \: $ rispetto alla variabile $ \: x $ .
Nota che differenziando \ eqref {A-04} rispetto a $ \: u \: $ abbiamo
\ begin {equation}
x \ boldsymbol {=} \ dfrac {\ mathrm d \ omega \ left (u \ right)} {\ mathrm du}
\ tag {A-07} \ label {A-07}
\ end {equation}
Quindi, la funzione $ \: f \ left (x \ right) \: $ e la sua trasformazione Legendre rispetto a $ \: x \: $ , ovvero la funzione $ \: \ omega \ left (u \ right) $ , soddisfa il seguente insieme di equazioni
\ begin {align}
f \ left (x \ right) \ boldsymbol {+} \ omega \ left (u \ right) & \ boldsymbol {=} u \ cdot x
\ tag {A-08a} \ label {A-08a} \\
u & \ boldsymbol {=} \ dfrac {\ mathrm df \ left (x \ right)} {\ mathrm dx}
\ tag {A-08b} \ label {A-08b} \\
x & \ boldsymbol {=} \ dfrac {\ mathrm d \ omega \ left (u \ right)} {\ mathrm du}
\ tag {A-08c} \ label {A-08c}
\ end {align}
Se nelle equazioni precedenti scambiamo i ruoli come segue
\ begin {align}
f & \ boldsymbol {\ rightleftarrows} \ omega
\ tag {A-09a} \ label {A-09a} \\
x & \ boldsymbol {\ rightleftarrows} u
\ tag {A-09b} \ label {A-09b}
\ end {align}
quindi le equazioni \ eqref {A-08a}, \ eqref {A-08b} e \ eqref {A-08c} danno rispettivamente
\ begin {align}
\ omega \ left (u \ right) \ boldsymbol {+} f \ left (x \ right) & \ boldsymbol {=} x \ cdot u
\ tag {A-10a} \ label {A-10a} \\
x & \ boldsymbol {=} \ dfrac {\ mathrm d \ omega \ left (u \ right)} {\ mathrm du}
\ tag {A-10b} \ label {A-10b} \\
u & \ boldsymbol {=} \ dfrac {\ mathrm df \ left (x \ right)} {\ mathrm dx}
\ tag {A-10c} \ label {A-10c}
\ end {align}
Ma questo insieme di equazioni è identico a quello di (A-08): la funzione $ \: f \ left (x \ right) \: $ è la trasformazione Legendre di $ \: \ omega \ left (u \ right) $ rispetto a $ \: u $ . Questa applicazione di due successive trasformazioni di Legendre restituisce la funzione iniziale.
$ \ boldsymbol {\ S \:} \ textbf {B. Meccanica classica - Funzioni di Lagrange e Hamilton} $
Nella meccanica classica l'equazione del moto di Eulero-Lagrange per un grado di libertà è
\ begin {equation}
\ dfrac {\ mathrm d} {\ mathrm dt} \ left (\ dfrac {\ partial L} {\ partial \ dot q} \ right) \ boldsymbol {-} \ dfrac {\ partial L} {\ partial q} \ grassetto {=} 0
\ tag {B-01} \ label {B-01}
\ end {equation}
dove
\ begin {align}
L \ left (q, \ dot q, t \ right) & \ boldsymbol {\ equiv} \ text {la funzione Lagrange}
\ tag {B-02a} \ label {B-02a} \\
q & \ boldsymbol {\ equiv} \ text {la coordinata generalizzata}
\ tag {B-02b} \ label {B-02b} \\
\ dot q & \ boldsymbol {\ equiv} \ dfrac {\ mathrm d q} {\ mathrm d t}
\ tag {B-02c} \ label {B-02c}
\ end {align}
Per la trasformata di Legendre della funzione Lagrange $ \: L \ left (q, \ dot q, t \ right) \: $ rispetto alla variabile indipendente $ \: \ dot q \: $ sostituiamo tutte le variabili, le funzioni e gli operatori differenziali in $ \: \ boldsymbol {\ S \ :} \ textbf {A} \: $ come segue
\ begin {align}
\ text {Variabili} \: \: \:: \: \: \: &
\sinistra.
\ begin {case}
X\!\!\! & \! \! \! \ boldsymbol {- \! \! \! - \! \! \! - \! \! \! \ rightarrow} \ dot q \\
u \! \! \! & \! \! \! \ boldsymbol {- \! \! \! - \! \! \! - \! \! \! \ rightarrow} p
\ end {case} \ right \}
\ tag {B-03a} \ label {B-03a} \\
\ text {Funzioni} \: \: \:: \: \: \: &
\sinistra.
\ begin {case}
f \! \! \! & \! \! \! \ boldsymbol {- \! \! \! - \! \! \! - \! \! \! \ rightarrow} L \\
\omega\!\!\! & \! \! \! \ boldsymbol {- \! \! \! - \! \! \! - \! \! \! \ rightarrow} H
\ end {case} \ right \}
\ tag {B-03b} \ label {B-03b} \\
\ text {Operatori} \: \: \:: \: \: \: &
\sinistra.
\ begin {case}
\ dfrac {\ mathrm d \ hphantom {x}} {\ mathrm d x} \! \! \! & \! \! \! \ boldsymbol {- \! \! \! - \! \! \! - \! \! \! \ rightarrow} \ dfrac {\ partial \ hphantom {x}} {\ partial \ dot q} \ vphantom {\ dfrac {a} {\ dfrac {a} {b}}} \\
\ dfrac {\ mathrm d \ hphantom {u}} {\ mathrm d u} \! \! \! & \! \! \! \ boldsymbol {- \! \! \! - \! \! \! - \! \! \! \ rightarrow} \ dfrac {\ partial \ hphantom {p}} {\ partial p}
\ end {case} \ right \}
\ tag {B-03c} \ label {B-03c}
\ end {align}
Le equazioni \ eqref {A-08a}, \ eqref {A-08b} e \ eqref {A-08c} danno rispettivamente
\ begin {align}
H \ sinistra (q, p, t \ destra) \ boldsymbol {+} L \ left (q, \ dot q, t \ right) & \ boldsymbol {=} p \, \ dot q
\ tag {B-04a} \ label {B-04a} \\
p & \ boldsymbol {=} \ dfrac {\ partial L \ left (q, \ dot q, t \ right)} {\ partial \ dot q}
\ tag {B-04b} \ label {B-04b} \\
\ dot q & \ boldsymbol {=} \ dfrac {\ partial H \ left (q, p, t \ right)} {\ partial p}
\ tag {B-04c} \ label {B-04c}
\ end {align}
Quindi la trasformata di Legendre della funzione Lagrange $ \: L \ left (q, \ dot q, t \ right) \: $ rispetto alla variabile indipendente $ \: \ dot q \: $ è la funzione Hamilton $ \: H \ left (q, p, t \ right) \: $ , da dove \ eqref {B-04a}
\ begin {equation}
H \ sinistra (q, p, t \ destra) \ boldsymbol {=} p \, \ dot q \ boldsymbol {-} L \ left (q, \ dot q, t \ right)
\ tag {B-05} \ label {B-05}
\ end {equation}
Nello spirito della discussione in $ \: \ boldsymbol {\ S \:} \ textbf {A} \: $ la funzione Hamilton $ \: H \ left (q, p, t \ right) \: $ è indipendente dalla variabile $ \: \ dot q $ span >, dipende dalla variabile indipendente $ \: p \ boldsymbol {\ equiv} \ text {the generalized momentum} $ .
L'equazione \ eqref {B-05} restituisce
\ begin {equation}
\ dfrac {\ partial H \ left (q, p, t \ right)} {\ partial q} \ boldsymbol {=} \ boldsymbol {-} \ dfrac {\ partial L \ left (q, \ dot q, t \ destra)} {\ partial q}
\ tag {B-06} \ label {B-06}
\ end {equation}
Da questa equazione e dalla definizione di $ \: p $ , vedere l'equazione \ eqref {B-04b}, l'equazione del moto di Eulero-Lagrange \ eqref {B-01} dà
\ begin {equation}
\ dot p \ boldsymbol {=} \ boldsymbol {-} \ dfrac {\ partial H \ left (q, p, t \ right)} {\ partial q}
\ tag {B-07} \ label {B-07}
\ end {equation}
Le equazioni \ eqref {B-04c} e \ eqref {B-07} costituiscono insieme le equazioni del moto di Hamilton
\ begin {equation}
\ text {Equazioni del moto di Hamilton} \: \: \:: \: \: \:
\sinistra.
\ begin {case}
\ dot q & \! \! \ boldsymbol {=} \ boldsymbol {+} \ dfrac {\ partial H \ left (q, p, t \ right)} {\ partial p} \ vphantom {\ dfrac {a} {\ dfrac {a} {b}}} \\
\ dot p & \! \! \ boldsymbol {=} \ boldsymbol {-} \ dfrac {\ partial H \ left (q, p, t \ right)} {\ partial q}
\ end {case} \ right \}
\ tag {B-08} \ label {B-08}
\ end {equation}